cz.cuni.amis.pogamut.usar2004.agent.module.configuration
Class VehicleConfiguration
java.lang.Object
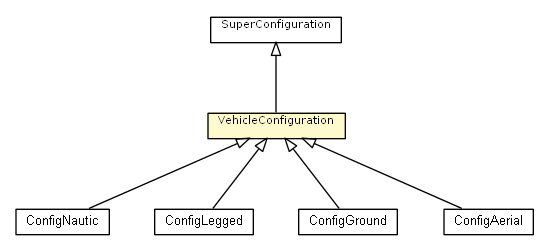
 cz.cuni.amis.pogamut.usar2004.agent.module.configuration.SuperConfiguration
cz.cuni.amis.pogamut.usar2004.agent.module.configuration.VehicleConfiguration
cz.cuni.amis.pogamut.usar2004.agent.module.configuration.SuperConfiguration
cz.cuni.amis.pogamut.usar2004.agent.module.configuration.VehicleConfiguration
- Direct Known Subclasses:
- ConfigAerial, ConfigGround, ConfigLegged, ConfigNautic
public abstract class VehicleConfiguration
- extends SuperConfiguration
Configuration for Vehicles - Ground, Aerial, Legged and Nautic share
properties present here.
- Author:
- vejmanm
|
Method Summary |
double |
getMass()
It is the robot's mass in kg. |
String |
getSteeringType()
Value should be one of the following: “AckermanSteered” or “SkidSteered”
or “OmniDrive”, as dictated by the steering type of the robot. |
| Methods inherited from class java.lang.Object |
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait |
VehicleConfiguration
public VehicleConfiguration(ConfigType type)
- Ctor.
- Parameters:
type - Configuration type describes particular subject about which
we want to know about. It is used to distinguish incoming message from
the server.
getSteeringType
public String getSteeringType()
- Value should be one of the following: “AckermanSteered” or “SkidSteered”
or “OmniDrive”, as dictated by the steering type of the robot.
- Returns:
- Returns steering type of the robot.
getMass
public double getMass()
- It is the robot's mass in kg.
- Returns:
- Returns mass of the robot.
Copyright © 2015 AMIS research group, Faculty of Mathematics and Physics, Charles University in Prague, Czech Republic. All Rights Reserved.