|
Interface Summary |
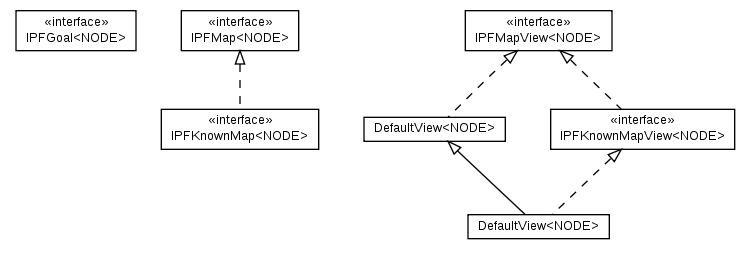
| IPFGoal<NODE> |
General interface that is describing the goal for the exploratory path-finder
such as A-Star algorithm. |
| IPFKnownMap<NODE> |
This class represents the discrete search space for path-finding algorithms for games. |
| IPFKnownMapView<NODE> |
This interface provides additional information about the map algorithms are going to work with. |
| IPFMap<NODE> |
This class represents the discrete search space for path-finding algorithms for games. |
| IPFMapView<NODE> |
This interface provides additional information about the map algorithms are going to work with. |