|
||||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | |||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | |||||||||
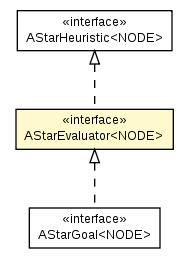
NODE - public interface AStarEvaluator<NODE>
Evaluator is extending a functionality of AStarHeuristic allowing
you to additionally specified which NODEs can't be visited at all or assign
extra cost to edges between nodes which is added to AStarMap.getEdgeCost(Object, Object)
when computing distances between them.
| Method Summary | |
|---|---|
int |
getExtraCost(NODE nodeFrom,
NODE nodeTo)
Returns extra cost to add to value when trying to go nodeFrom to nodeTo ... |
boolean |
isNodeOpened(NODE node)
Returns true if A* can use this node (e.g. |
| Methods inherited from interface cz.cuni.amis.utils.astar.AStarHeuristic |
|---|
getEstimatedDistanceToGoal |
| Method Detail |
|---|
boolean isNodeOpened(NODE node)
int getExtraCost(NODE nodeFrom,
NODE nodeTo)
|
||||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | |||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | |||||||||